
|
I am a master's student at Umich, advised by Prof. Maani Ghaffari. My interests lie in contact-rich interactions and mobile manipulation for general-purpose robots. I am especially drawn to exploring areas that are new and unfamiliar to me. |
News
|
|
webpage |
arXiv |
abstract
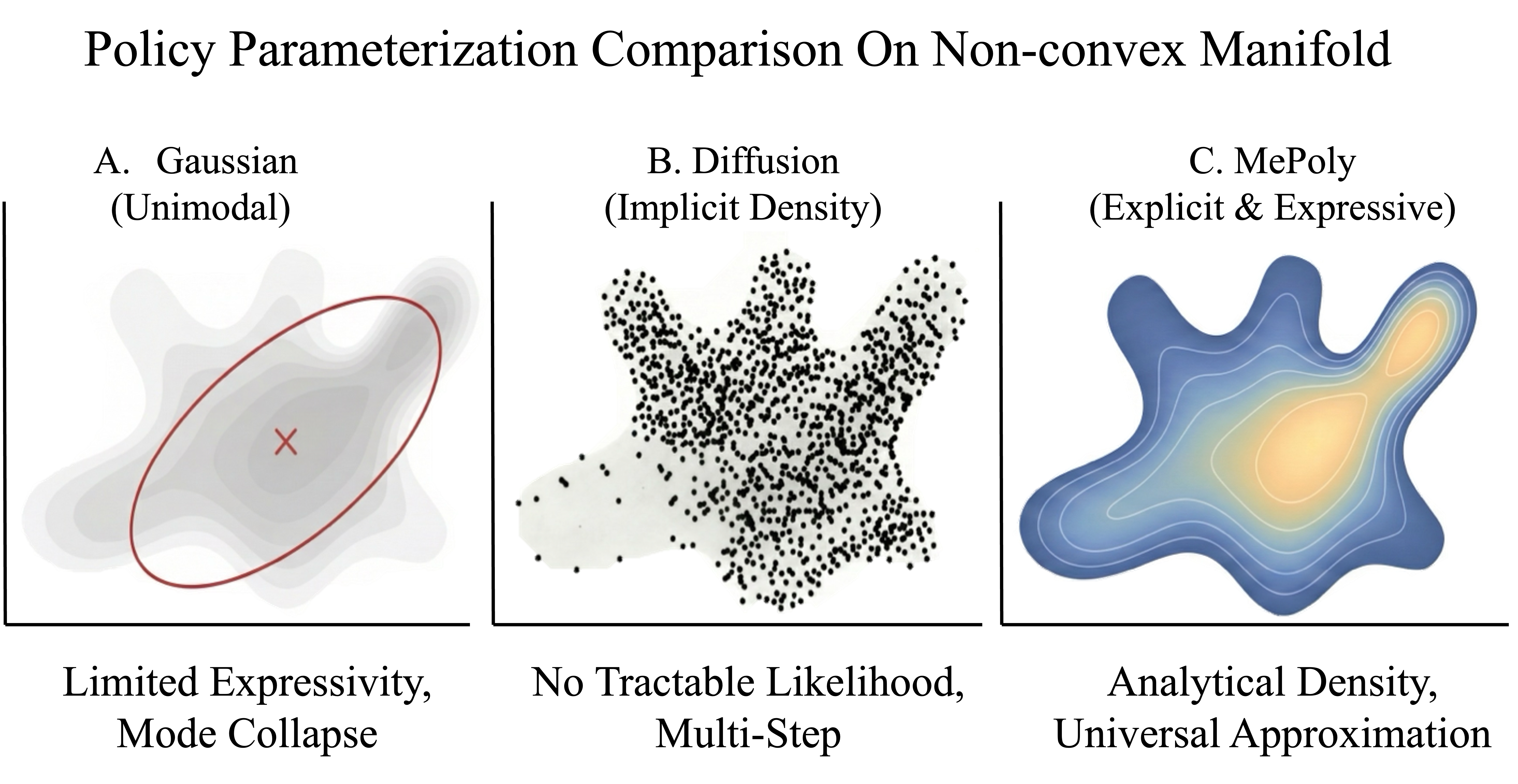
Stochastic optimal control provides a unified mathematical framework for solving complex decision-making problems, encompassing paradigms such as maximum entropy reinforcement learning (RL) and imitation learning (IL). However, conventional parametric policies often struggle to represent solution multi-modality. Although diffusion-based policies aim to recover multi-modality, they lack an explicit probability density, which complicates policy-gradient optimization. To bridge this gap, we propose MePoly, a novel policy parameterization based on polynomial energy-based models. MePoly provides an explicit, tractable probability density, enabling exact entropy maximization. Theoretically, we ground our method in the classical moment problem, leveraging universal approximation capabilities for arbitrary distributions. Empirically, we demonstrate that MePoly effectively captures complex non-convex manifolds and outperforms baselines across diverse benchmarks.
@article{TBD
}
|
|
webpage |
arXiv |
abstract
Enabling humanoid robots to exploit physical contact, rather than simply avoid collisions, is crucial for autonomy in unstructured environments. Traditional optimization-based planners struggle with contact complexity, while on-policy reinforcement learning (RL) is sample-inefficient and has limited multi-task ability. We propose a framework combining a learned world model with sampling-based Model Predictive Control (MPC), trained on a demonstration-free offline dataset to predict future outcomes in a compressed latent space. To address sparse contact rewards and sensor noise, the MPC uses a learned surrogate value function for dense, robust planning. Our single, scalable model supports contact-aware tasks, including wall support after perturbation, blocking incoming objects, and traversing height-limited arches, with improved data efficiency and multi-task capability over on-policy RL. Deployed on a physical humanoid, our system achieves robust, real-time contact planning from proprioception and ego-centric depth images.
@article{TBD
}
|
|
|
webpage |
arXiv |
abstract
This paper introduces Discrete-time Hybrid Automata Learning (DHAL), a framework using on-policy Reinforcement Learning to identify and execute mode-switching without trajectory segmentation or event function learning. Hybrid dynamical systems, which include continuous flow and discrete mode switching, can model robotics tasks like legged robot locomotion. Model-based methods depend on predefined gaits, while model-free approaches lack explicit mode-switching knowledge. Current methods identify discrete modes via segmentation before regressing continuous flow, but learning high-dimensional complex rigid body dynamics without trajectory labels or segmentation is a challenging open problem. Our approach incorporates a beta policy distribution and a multi-critic architecture to model contact-guided motions, exemplified by a challenging quadrupedal robot skateboard task. We validate our method through simulations and real-world tests, demonstrating robust performance in hybrid dynamical systems.
@article{TBD
}
|
|
|
webpage |
arXiv |
abstract
In the field of locomotion task of quadruped robots, Blind Policy and Perceptive Policy each have their own advantages and limitations. The Blind Policy relies on preset sensor information and algorithms, suitable for known and structured environments, but it lacks adaptability in complex or unknown environments. The Perceptive Policy uses visual sensors to obtain detailed environmental information, allowing it to adapt to complex terrains, but its effectiveness is limited under occluded conditions, especially when perception fails. Unlike the Blind Policy, the Perceptive Policy is not as robust under these conditions. To address these challenges, we propose a Multi-Brain collaborative system that incorporates the concepts of Multi-Agent Reinforcement Learning and introduces collaboration between the Blind Policy and the Perceptive Policy. By applying this multi-policy collaborative model to a quadruped robot, the robot can maintain stable locomotion even when the perceptual system is impaired or observational data is incomplete. Our simulations and real-world experiments demonstrate that this system significantly improves the robot's passability and robustness against perception failures in complex environments, validating the effectiveness of multi-policy collaboration in enhancing robotic motion performance.
@article{TBD
}
|
|
|
webpage |
arXiv |
abstract
Traversing 3-D complex environments has always been a significant challenge for legged locomotion. Existing methods typically rely on external sensors such as vision and lidar to preemptively react to obstacles by acquiring environmental information. However, in scenarios like nighttime or dense forests, external sensors often fail to function properly, necessitating robots to rely on proprioceptive sensors to perceive diverse obstacles in the environment and respond promptly. This task is undeniably challenging. Our research finds that methods based on collision detection can enhance a robot's perception of environmental obstacles. In this work, we propose an end-to-end learning-based quadruped robot motion controller that relies solely on proprioceptive sensing. This controller can accurately detect, localize, and agilely respond to collisions in unknown and complex 3D environments, thereby improving the robot's traversability in complex environments. We demonstrate in both simulation and real-world experiments that our method enables quadruped robots to successfully traverse challenging obstacles in various complex environments.
@inproceedings{go2traverse,
title={Quadruped robot traversing 3D complex environments},
author={Yi Cheng, Hang Liu, Guoping Pan, Houde Liu, Linqi Ye},
booktitle={arXiv preprint arXiv:2404.18225},
year={2024},
}
|
|

|
webpage |
arXiv |
abstract
Designing a bipedal robot is a complex and challenging task, especially when dealing with a multitude of structural parameters. Traditional design methods often rely on human intuition and experience. However, such approaches are time-consuming, labor-intensive, lack theoretical guidance, and struggle to obtain optimal design results within vast design spaces, thus failing to fully exploit the inherent performance potential of robots. In this context, this paper introduces the SERL (Structure Evolution Reinforcement Learning) algorithm, which combines reinforcement learning for locomotion tasks with evolution algorithms. The aim is to identify the optimal parameter combinations within a given multidimensional design space. Through the SERL algorithm, we successfully designed a bipedal robot named Wow Orin, where the optimal leg length is obtained through optimization based on body structure and motor torque. We have experimentally validated the effectiveness of the SERL algorithm, which is capable of optimizing the best structure within specified design space and task conditions. Additionally, to assess the performance gap between our designed robot and the current state-of-the-art robots, we comparedWow Orin with mainstream bipedal robots Cassie and Unitree H1. A series of experimental results demonstrate the Outstanding energy efficiency and performance of Wow Orin, further validating the feasibility of applying the SERL algorithm to practical design.
@inproceedings{TBD}
|
|
|